
数十ナノメートルの位置決めを、ミリのストロークで
~ 電磁モータの熱変位と、ピエゾステージの短ストロークからの解放 ~
このような課題を抱えていませんか?
| ✔ 熱によるドリフト:停止中の保持電流による発熱で、せっかく合わせた光軸が刻々とズレてしまう |
| ✔ 動作量の不足:ピエゾステージの超高精度は魅力だが、200μmほどの動作量では調整範囲が足りない |
| ✔ 微細なノイズ:サーボロック特有の「ハンチング(微小振動)」が、繊細な観測データではノイズになる |
| ✔ 設置スペース:電磁モータ部のでっぱりが邪魔だが、50nm以下の精度は妥協したくない |
この課題、THKプレシジョンの ”ピエゾモータステージ” が解決します。

1.ミリメートルの動作が可能で、ナノレベル位置決めの理由
「ピエゾモーターステージ」の駆動源は、ナノレベル動作で使われるピエゾ(圧電)素子アクチュエータです
✔ なぜピエゾが「ミリメートル」も動けるのか?
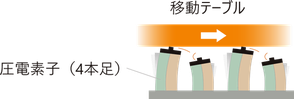
その答えは内部に搭載されている PiezoLEGS®の「歩行動作(デルタ駆動)」にあります
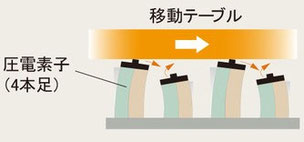

- 4足歩行: 2本ずつペアになった足が、交互に「伸長」と「屈曲」を繰り返す
- 摩擦で送る: 2つのペアが異なる位相でロッドを捉え、地面を蹴るようにロッドを順々に送る
- ”塵も積もれば”の動作:一歩=1サイクル 4〜5μmの小さな歩みを高速で積み重ね、最大25mmの動作量を可能に
<駆動イメージ>

✔ なぜ「ナノ」レベルで制御できるのか?
一歩の中を極限まで細分化する制御と高精度リニアスケールが”鍵”で、直接、動作テーブルを監視・制御しています
- 専用コントローラー: 1サイクルを8192分割で微小コントロール。1歩の中をさらに細分化
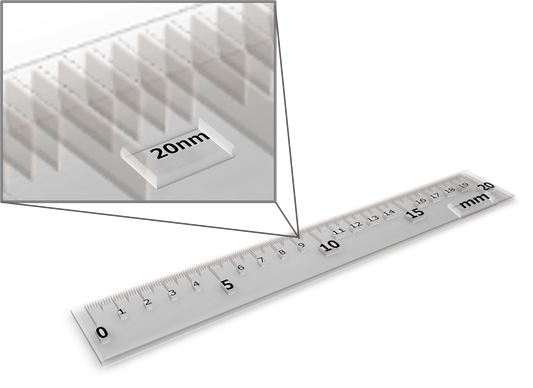
- 高分解能リニアスケール: 20nm or 40nmの高分解能エンコーダーを搭載
2.特徴
● 電源OFFでもセルフロッキングで位置保持
位置決め完了後、電源をOFFにしても位置ズレを起こすことのない独自のセルフロッキング(パーキング)機能を備えており、高い保持力によりその位置を保持
● リニアエンコーダ内蔵で高い位置再現性
光学式リニアエンコーダを内蔵したタイプ(20nm分解能)と、低価格のTHKプレシジョン製光学式リニアエンコーダを内蔵したタイプ(40nm分解能)を選択可能
● 真空環境対応、非磁性対応
アクチュエータは、真空対応タイプや非磁性真空タイプがあり、カスタム対応しております
3.分解能が高い"ピエゾモータステージ" と "ピエゾステージ" の違い
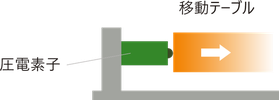
ミリ動作可能な「ピエゾモータステージ」と、高精度ナノレベル位置決めで使われている「ピエゾステージ」は、どちらも圧電(ピエゾ)素子を駆動源としていますが、動作原理が異なり、性能特徴も異なります
※用途に合わせて選ぶ、2つのピエゾ駆動方式
| 比較項目 | ピエゾモータステージ | ピエゾステージ |
| 駆動方式 | 4本の足の伸長と伸縮動作による摩擦駆動 | 積層型ピエゾの伸縮動作 |
| 可動範囲 | 長い:〜25 mm以上も可 | 短い:拡大機構付きで1mm未満 |
| 移動ガイド | クロスローラ | 弾性ヒンジ |
| 分解能 | 20 nm, 40 nm | 1 nm~ |
| 電源OFF時の位置保持 | 〇 | × |
| 発生力、推力 | 推力 6N, 20N | 発生力 数十~数百N |
| 得意用途 | 静的位置決め、長時間の位置保持 |
高分解能、高速応答、高発生力 |
4.用途例
· 光学系・レーザーアライメント:
一度決めた光軸を数時間にわたって、その場を位置維持する必要がある用途に
☞フォーカス微調整、サンプル位置の固定・微小ステップ調整、光路合わせ、ビームアライメント
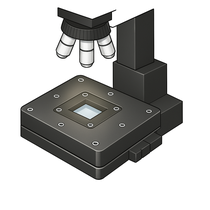
· 分析・測定装置:
顕微鏡などの広範囲なマッピング測定後、特定の位置での長時間安定停止&観測
☞フォースセンサとの併用により、距離×力の可視化も
· 半導体・精密検査設備:
高性能レンズなど光学系の微小位置合わせ。プローバの接触位置、微小位置調整など
☞位置決め完了後の安定性が品質を左右する工程に
· 特殊環境での精密位置決め:
真空チャンバーの中での光学系・試料のアライメント。非磁性環境にもカスタム対応
| ● 光学ミラー・レーザー系の高精度位置決め | ● 真空チャンバー内での精密マッピング測定 | |
| ● ウェハー・光学系の微小回転角の調整 | ● 顕微鏡用試料ステージ | |
| ● 位置決め完了後、安定した静止保持を必要とする用途 | ||
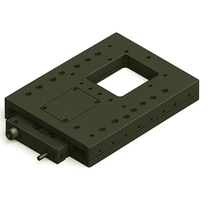
5.製品ラインナップ
|
X軸 |

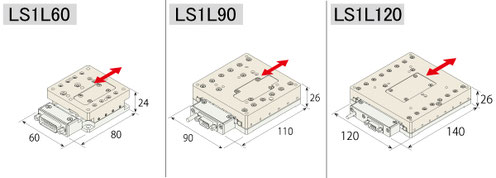
| 型番 | 可動範囲 | 分解能 | 推力 | 最大移動速度 | 耐荷重 |
| LS1L60(F)-08B-06 | ±4 mm | 40 nm | 6N | 5mm/sec | 1kg |
| LS1L90(F)-16□-□ | ±8 mm | 20nm, 40nm | 6N, 20N | 5mm/sec | 2kg |
| LS1L120(F)-25□-□ | ±12.5 mm | 20nm, 40nm | 6N, 20N | 5mm/sec | 3kg |
※X軸ステージ2台を直交して組み合わせたXY軸ステージの構成も可能
|
XY軸 |


| 型番 | 可動範囲 | 分解能 | 推力 | 最大移動速度 | 耐荷重 |
| LS2K180-16B-□ | (X,Y) ±8 mm | (X,Y) 40 nm | 6N, 20N | 5mm/sec | 2kg |
※中央に開口を有し、可動範囲全域において開口を塞ぎません
|
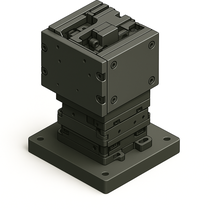
Z軸 |

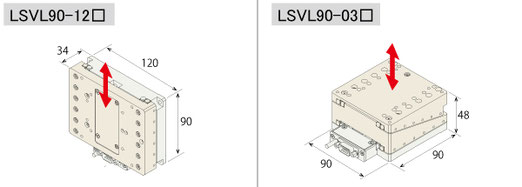
| 型番 | 可動範囲 | 分解能 | 推力 | 最大移動速度 | 耐荷重 |
| LSVL90(F)-12□-20 | ±6 mm | 20nm, 40 nm | 20N | 5mm/sec | 0.5kg |
| LSVL90(F)-03□-20 | ±1.5 mm | 20nm, 40 nm | 20N | 1mm/sec | 5kg |
※垂直タイプ : X軸を縦置きした形で、長いストロークを維持
水平面タイプ: くさび構造で、移動テーブルが水平を維持したまま昇降。短ストロークながら重量物でも安定した動作
|
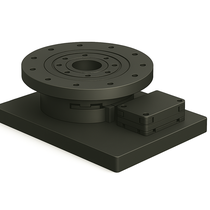
回転 ・ ゴニオ軸 |


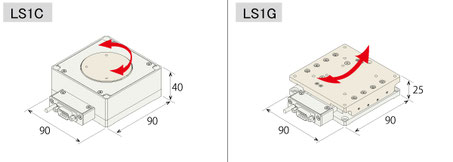
| 型番 | 可動範囲 | 分解能 | 推力 | 最大移動速度 | 耐荷重 |
| LS1C90-02□-20 | ±1° | 0.2秒, 0.4秒 | 20N | 12°/sec | 2kg |
| LS1G□90-02□-20 | ±1° | 0.1秒, 0.2秒 | 20N | 2.4°/sec | 2kg |
※回転タイプ:回転範囲はわずかながら、高い角度分解能と位置再現性
ゴニオタイプ:仮想点までの距離が異なる2機種あり。組み合わせで同一仮想点をもった2軸(θx, θy)ステージに
|
制御コントローラ |

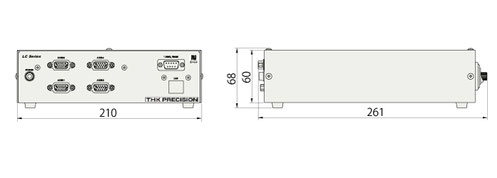
| 型番 | 制御軸数 | 接続リニアスケール | 制御インターフェース | 外形寸法 | 電源 |
|
FC421A FC421B |
1 |
A:レニショー製 B:THKプレシジョン製 |
LAN, RS485 (RS232Cへ変更可)
|
W210× D240× H68 mm |
AC100 ~ 120V |
|
FC422A FC422B |
2 | ||||
|
FC443A FC443B |
3 | ||||
|
FC444A FC444B |
4 |
※制御インターフェース:LAN、RS485、USB、RS232Cを選択
制御基板、ドライバ基板、リニアセンサインタポレータを内蔵
|
サンプル動作ソフト:PCから簡単操作 |
・指定位置への移動、原点復帰、速度変更、ジョグ駆動など基本的な機能
・ホームページからダウンロード可能


6.良くあるご質問 Q & A
Q1:ピエゾモータタイプは、長時間の連続動作(スキャニング)に向いていますか?
A: 当製品は摩擦駆動方式であるため、長時間の高速連続駆動よりも、特定のポイントへ精密に移動して「静止・保持」する用途に向いております。この「静的な位置決め」においては、電源OFFでも位置がズレない強みを発揮します
Q2:電源を切っても、位置が保持されるのはなぜですか?
A: アクチュエータのセルフロッキング機能により、電源OFFの状態でも、仕様上の推力と同等の摩擦保持力が発生します。これにより、通電による発熱(熱ドリフト)の影響をゼロに抑えて、位置保持することができます
Q3:制御コントローラとの接続やプログラミングは難しいですか?
A: 専用コントローラ「LCシリーズ」は、USB/LAN/RS232C等のインターフェースを装備し、PCと接続が可能で、シンプルなコマンド体系で制御でき、PythonやLabVIEW等への組み込みも容易です
お問い合わせフォーム
製品に関するご質問、デモ機のご希望などお気軽にお問い合わせください。
フォームが表示されるまでしばらくお待ち下さい。
恐れ入りますが、しばらくお待ちいただいてもフォームが表示されない場合は、こちらまでお問い合わせください。